I'm a PhD candidate in BioRobotics Lab at the EPFL under the supervision of Prof. Auke Ijspeert. I am a robotics/ML researcher intrested on the use of Reinforcement Learning and Optimization algorithms for agile movement generation of legged robots. We use robots as tools to investigate scientific hypotheses about animal motor-control, iteratively taking inspiration from animals to improve the robots’ performance.
I received my master degree in Mechanical engineering from University of Tehran in 2017. In 2017-2018, I had been the leader of the Dynamic and Control group of SURENA humanoid robot projects at CAST, University of Tehran, where I used the SURENA and Surena Mini as research platforms.
News
April 2024:
DeepTransition paper has been accepted at Natrure Communications.
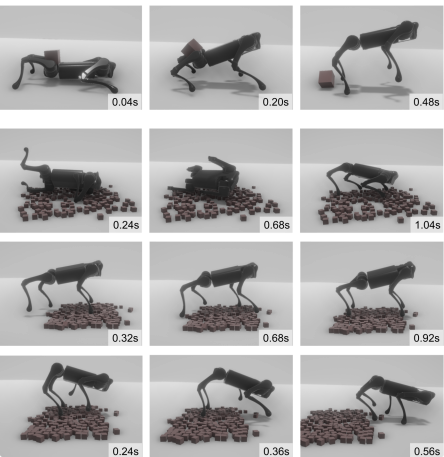
Quadruped-Frog: Rapid Online Optimization of Continuous Quadruped Jumping Guillaume Bellegarda,
Milad Shafiee,
Auke Ijspeert,
International Conference on Robotics and Automation (ICRA), 2024
arXiv
/
video
Visual CPG-RL: Learning Central Pattern Generators for Visually-Guided Quadruped Locomotion Guillaume Bellegarda,
Milad Shafiee,
Auke Ijspeert,
International Conference on Robotics and Automation (ICRA), 2024
arXiv
/
video